Spherical Robot
Undergraduate Research
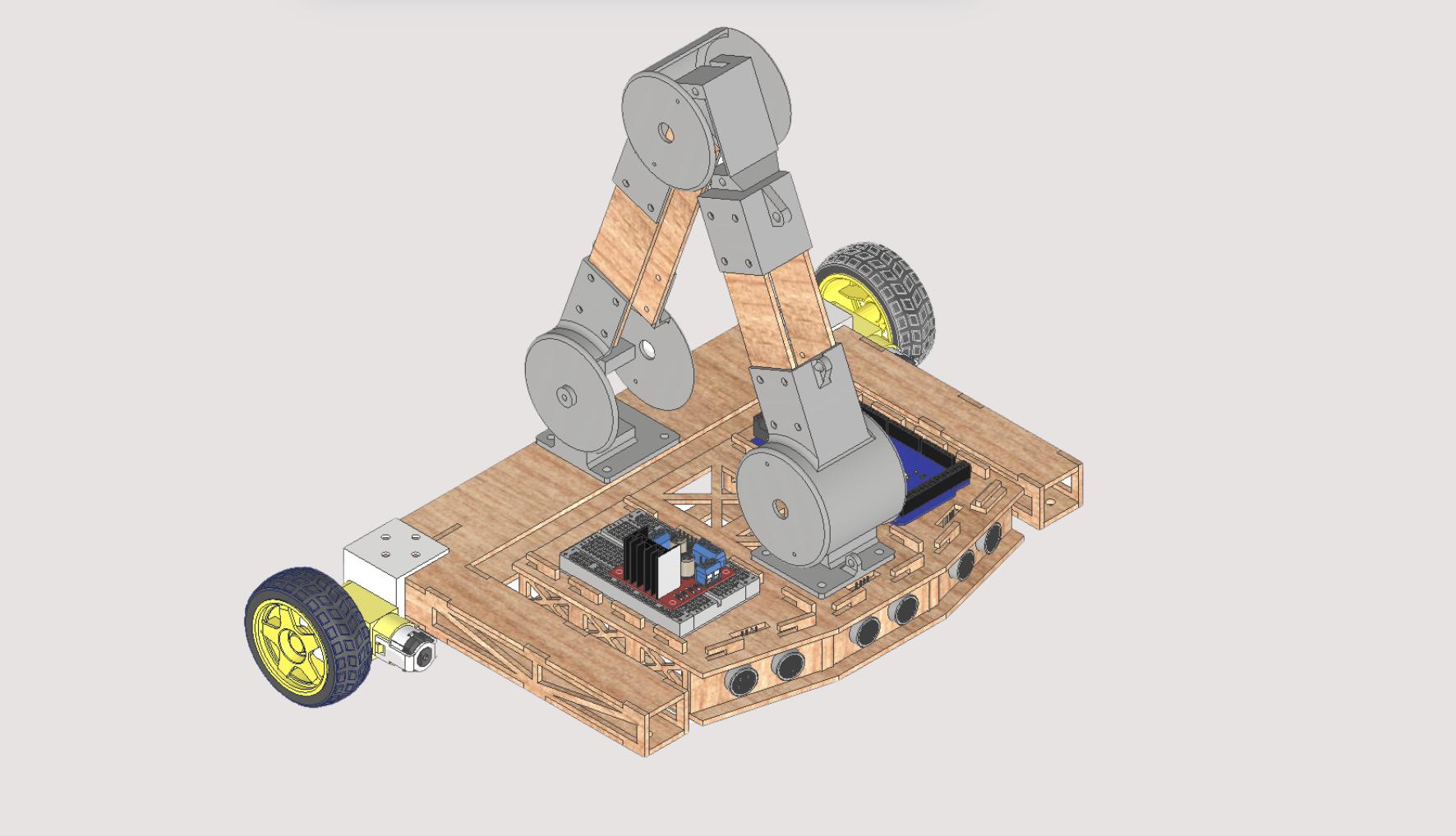
Dual-mode spherical robot with coaxial pendulum drive and impulsive momentum actuation, enabling omnidirectional rolling, side-rolling, and deformable terrain escape.
PythonMechatronicsControl
View Details